【ROS实战】05-🚀什么是 ROS 中的 tf?让我们从坐标系说起!
【ROS实战】05-🚀什么是 ROS 中的 tf?让我们从坐标系说起!
赵洲洋🚀 什么是 ROS 中的 tf?让我们从坐标系说起!
在机器人系统中,有一个名词经常出现,却让人一脸疑惑,那就是 tf。它到底是什么?为什么每个机器人教程都绕不开它?今天我们就用最通俗的语言,来讲清楚这件事。
🧭 第一章:坐标系到底是什么?
你有没有玩过迷宫游戏?地图上会有一个“你在这儿”的小红点。如果没有这个红点,你就不知道自己在哪。
坐标系就像那个“你在这儿”的标记,它告诉你:
- 原点在哪儿(坐标为0,0,0)
- 前方是哪边(x轴),右边是哪边(y轴),上方是哪边(z轴)
有了坐标系,我们就可以给任何物体标记一个具体的位置,比如:
“小球在我前方 2 米,右边 1 米的位置”
这就可以写成坐标:(x=2, y=1, z=0)
🤖 第二章:机器人身上到底有多少个坐标系?
机器人身上,其实藏着很多个“视角”,也就是坐标系。
举个例子,一台机器人可能有:
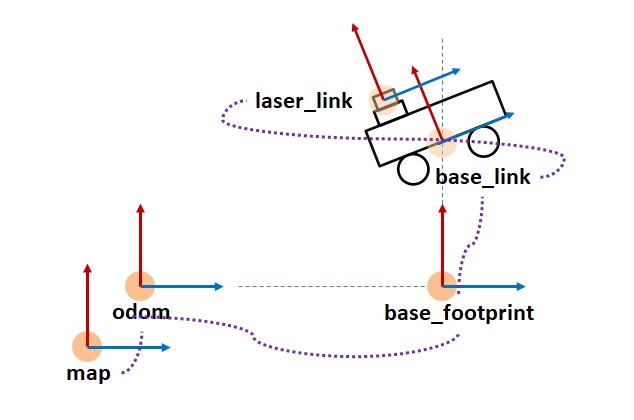
- 地图坐标系(map):这是房间的坐标系,房间角落是原点。
- 里程计坐标系(odom):机器人一启动,就把当前位置当作原点。
- 机器人自身坐标系(base_link):这个坐标系绑在机器人本体上,像它的“肚脐眼”。
- 摄像头坐标系(camera_link):装在机器人头上的相机,看到的世界是它的坐标系。
- 雷达坐标系(laser):安装在机器人前方的激光雷达,它看到的方向和相机可能不一样。
所以,每个设备看世界的角度不同,就像你站在客厅和你站在厨房,看同一个桌子的位置,坐标是不一样的。
🧮 第三章:一个点的位置,到底是谁说了算?
问题来了:
摄像头说这个红球在 x=1 米、y=0 米的位置,但机器人能直接走过去吗?
不能。因为这个坐标是“摄像头视角”的。机器人自己并不认识这个坐标。
那怎么办?
答案就是:我们要把这个坐标,从“摄像头坐标系”,转换成“机器人自己坐标系”下的坐标,这样它才能理解“红球在哪儿”。
这种从一个坐标系转到另一个坐标系的过程,就叫做坐标变换。
🌎 第四章:odom 是什么?map 又是什么?
现在来说说 odom。
🗺️ map 坐标系
map 是地图坐标系,假设我们给房间画一张地图,左下角是 (0,0),正右是 x 轴,正上是 y 轴。这是我们人类眼中的世界坐标系。
🧭 odom 坐标系
odom 是机器人自己的一套参考系统。可以这样理解:
机器人一启动,就把它站着的那个点当成了 (0,0),然后它往前走 1 米,odom 坐标就变成了 (1,0)。
但是,这个位置可能不是房间地图上的 (1,0),因为机器人只靠轮子估算自己走了多远,而轮子会打滑、误差累积。
所以,odom 是一种估算出来的位置,但会随着时间逐渐偏离真实位置。
你可以想象 odom 是机器人的“小脑袋”,它说:“我大概走了 3 米向前”,但不一定百分百准确。
🧍 第五章:base_link 是谁?
base_link 是一个名字,但它代表的是:
机器人自己身体的坐标系。
一般我们把这个坐标系的原点放在机器人身体中间,比如底盘中心,或两个轮子之间。这个点不是真的“设在哪里”,而是我们人为地定义一个“我是谁”的起点。
从此以后:
- 摄像头在 base_link 前面 0.3 米,高度 0.5 米;
- 激光雷达在 base_link 前面 0.2 米;
- 机械臂根部就在 base_link 的正中间;
所有设备的位置都可以用 base_link 作为基准来描述。
🧠 第六章:那 tf 又是什么?
tf 是 ROS 中的一个系统,全称叫 transform(变换),它有两个重要功能:
- 记录各个坐标系之间的关系
- 帮你把一个坐标从 A 转换到 B
比如:
1 | map → odom → base_link → camera_link |
每个箭头之间代表“坐标变换”。比如:
- 从 map 到 odom:表示机器人在地图中的真实位置
- 从 odom 到 base_link:表示机器人“认为”自己在哪
- 从 base_link 到 camera_link:表示摄像头安装在哪
这个结构像什么?像一棵树,每个坐标系都是一个节点,每条边是一种连接关系,所以我们叫它tf 树(transform tree)。
📌 第七章:不使用 tf 会怎样?
如果你不用 tf,意味着你要自己手动计算所有坐标变换!
来看个例子:
- 摄像头看到红球在它正前方 1 米处 (1.0, 0.0)
- 摄像头安装在机器人前方 0.3 米、高 0.5 米
- 机器人自己认为它在 odom 中是 (2.0, 1.0),朝向是东
- 你想知道:这个红球在 map 中的真实位置是多少?
如果没有 tf,你需要:
- 自己写数学公式:先从 camera 转成 base_link,再从 base_link 转成 odom,再从 odom 转到 map;
- 考虑机器人是否旋转过;
- 考虑每个坐标的时间戳是否一致;
- 一堆复杂的矩阵变换、旋转计算……
有了 tf 呢?
你只要说:
“请 tf 帮我把 camera 中的这个点,转换到 map 中”
它就自动帮你做了所有事情,考虑时间、方向、位置,全都搞定。
✅ 第八章:总结一句话
tf 是让机器人系统中所有“眼睛、手、身体”能够彼此交流的语言桥梁。它管理着每个部分“怎么看世界”,并负责把这些视角统一起来,让机器人知道:
- 我是谁
- 我在哪儿
- 我看到的东西在哪儿
- 我要去哪儿
如果没有 tf,机器人会像一个人闭着眼睛在摸黑走路——根本不知道身边的一切东西在哪。
希望读完后,心里对 tf 已经有了清晰的轮廓。
如果你喜欢这篇文章,欢迎点赞收藏!